Robot chirurgici per interventi mini-invasivi.
Tra i componenti più importanti impiegati nelle ultime versioni del sistema chirurgico da Vinci™S HD sono da annoverare dei motori di alta qualità, capaci di garantire movimenti perfettamente scorrevoli anche a velocità ridotte.
Il sistema chirurgico da Vinci™S HD della Intuitive Surgical Inc. (Sunnyvale, CA, USA) viene oggi impiegato per l'esecuzione di operazioni particolarmente complesse e consente ai chirurghi di realizzare interventi con un grado di invasività estremamente ridotto. Sfruttando le più avanzate tecnologie di controllo del movimento, il sistema offre strumenti operatori in grado di lavorare come le mani ferme e precise dei più esperti chirurghi, anche nei movimenti più lenti. Intuitive Surgical ha costantemente perfezionato il suo sistema da Vinci S HD, servendosi dei componenti ed elementi di comando più innovativi disponibili sul mercato al fine di garantire una sicurezza sempre maggiore nell'esecuzione di interventi chirurgici salvavita. Ogni sistema da Vinci S HD contiene 39 motori maxon.
Il sistema chirurgico
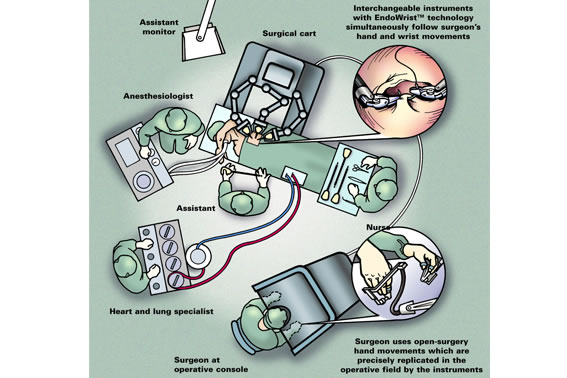
Il sistema chirurgico necessita solamente di tre piccole incisioni lunghe 8 o 12 mm nel corpo del paziente, attraverso le quali vengono introdotti due manipolatori chirurgici e una telecamera. Durante l'operazione solo il robot e gli assistenti tecnici sono con il paziente, mentre il chirurgo che comanda il sistema è seduto in un altro punto della sala operatoria, davanti alla console su cui viene riprodotto con precisione “Look and Feel” un intervento a cielo aperto.
Il sistema da Vinci S HD è concepito per divenire parte integrante della sala operatoria e fornire il proprio contributo come qualunque altro componente dell'equipe chirurgica. L'intero sistema è composto da tre componenti principali: la console operatoria, un portastrumenti mobile posto accanto al tavolo operatorio e l'unità di elaborazione immagini.
La console di comando, da cui il chirurgo mantiene costantemente un controllo totale sullo svolgimento dell'operazione, costituisce il nucleo essenziale del sistema da Vinci S HD. Altre tecniche operatorie basate sulla trasmissione video sperimentate in passato non si erano dimostrate altrettanto efficaci. L'inconveniente principale era rappresentato dalla necessità per gli operatori di imparare a compiere i movimenti in senso inverso – come ad esempio allacciarsi le scarpe con delle bacchette: se si muovono le bacchette a sinistra, le punte si spostano a destra. I movimenti controintuitivi classici della laparoscopia standard funzionano esattamente nello stesso modo. Il chirurgo doveva dunque apprendere a poco a poco, con l'esperienza, queste sequenze di movimenti contrari all'intuizione.
Con il sistema chirurgico da Vinci S HD il chirurgo può eseguire l'operazione da una console di comando, stando comodamente seduto e osservando il campo operatorio tramite una visualizzazione tridimensionale ad alta definizione e risoluzione di una qualità mai raggiunta in precedenza. Primo robot chirurgico al mondo con rappresentazione 3D ad alta risoluzione e definizione, questo sistema offre una risoluzione del display due volte superiore a quella dei modelli precedenti e una rappresentazione più chiara e dettagliata dei tessuti e delle parti anatomiche critiche. Il sistema ottico InSite™, l'endoscopio 3D ad alta risoluzione e il modulo di elaborazione delle immagini garantiscono una riproduzione fedele del campo operatorio. La sincronizzazione delle immagini, l'illuminazione ad alta intensità e le unità di comando della telecamera contribuiscono ad amplificare le immagini e ad ottimizzarne la qualità.
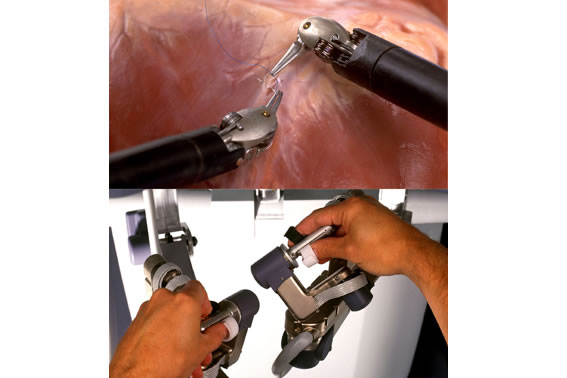
Sulla console operatoria il chirurgo esegue i movimenti con l'ausilio di strumenti detti master (elementi di comando che riproducono i movimenti realizzati durante l'intervento). L'operatore manovra con le dita gli elementi di comando master situati sotto il display: le articolazioni dei polsi si trovano così in una posizione naturale rispetto agli occhi. I movimenti del chirurgo vengono poi immediatamente trasmessi, in tempo reale e con la massima precisione, agli strumenti inseriti nel corpo del paziente.
Il chirurgo guida i manipolatori chirurgici del robot mediante movimenti di polso, mano e dita come nella tecnica operatoria classica. Per il sistema è disponibile un'ampia gamma di strumenti EndoWrist™. Questi strumenti endoscopici sono realizzati a imitazione delle articolazioni delle mani umane e presentano sette gradi di libertà di movimento. Ogni strumento è concepito per una determinata fase dell'intervento, quale ad esempio aggraffatura, sutura o manipolazione di tessuti.
Nel carrello situato accanto al tavolo operatorio sono alloggiati i due bracci robotici e il braccio endoscopico, che riproducono i movimenti dell'operatore. Come opzione è possibile installare un terzo braccio robotico, che permette al chirurgo di impiegare uno strumento endoscopico supplementare con funzioni operative aggiuntive. Il centro di rotazione degli strumenti laparoscopici è situato nelle immediate vicinanze delle incisioni chirurgiche; ciò elimina la necessità di utilizzare la parete addominale del paziente come fulcro di leva. In questo modo si riduce al minimo il rischio di lesioni di tessuti e nervi. Gli assistenti tecnici installano gli strumenti corretti, preparano l'introduzione delle sonde nel corpo del paziente e sorvegliano i bracci e gli strumenti laparoscopici utilizzati durante l'intervento.
Scelta dei motori
Per l'esecuzione di interventi chirurgici con strumenti robotici inseriti nel corpo del paziente attraverso incisioni di dimensioni ridotte (8–10 mm), la precisione dei movimenti comandati riveste un'importanza fondamentale. Cuore di ogni sistema robotico sono i motori a corrente continua DC sviluppati e prodotti da maxon.
Mike Prindiville, manager responsabile delle tecniche di produzione di Intuitive Surgical, dichiara in proposito: “Il mercato offre diverse alternative, ma maxon ha saputo soddisfare in modo costante e affidabile le nostre esigenze a livello di qualità e prestazioni, affermandosi come partner solido che contribuisce in larga misura al successo del nostro prodotto.” I motori maxon forniscono i segnali di ingresso e di uscita per il sistema da Vinci S HD. Tramite una serie di regolazioni di feedback, motori ed encoder ricevono i segnali di ingresso dall'operatore. L'elettronica integrata nella console del sistema traduce tali segnali in tempo reale e li converte in segnali di uscita per i motori installati nel robot. Sempre tramite l'elettronica della console, i robot esercitano a loro volta una resistenza sensibile sulle mani del chirurgo.
Gli ingegneri di Intuitive Surgical hanno integrato più di 30 motori maxon, inclusi motori RE 25 con e senza feedback da encoder, motori RE 13 equipaggiati con riduttore planetario della serie GP 13 ed encoder magnetici con diametro di 13 mm nonché motori RE 35 con encoder prodotti da terzi.
I motori maxon sono dotati di magneti in terre rare e rotori senza ferro. Grazie alla loro speciale concezione non presentano cogging magnetico - un grande vantaggio rispetto ai motori tradizionali, specialmente per il funzionamento a velocità ridotte. Questi motori possono inoltre vantare un'elevata densità di potenza e stabilità di funzionamento, entrambi presupposti fondamentali per i compiti specifici richiesti da Intuitive Surgical.
A causa della doppia funzione che svolgono, i motori presenti nella console operatoria sono definiti “master”. Gli azionamenti slave integrati nei robot manipolatori garantiscono lo stesso grado di precisione, dispongono però anche di un'opzione di ritorno durante il posizionamento degli attuatori da parte dell'assistente chirurgo. I motori sono inoltre caratterizzati da un'isteresi ridotta sulle punte utensile degli strumenti.
Conclusione
Il sistema chirurgico da Vinci S HD è l'unica tecnologia attualmente disponibile in commercio in grado di offrire al chirurgo un comando intuitivo degli strumenti operatori, una completa libertà di movimento, una manipolazione delicata dei tessuti e una visualizzazione tridimensionale che riproduce fedelmente lo scenario di un'operazione a cielo aperto, consentendo tuttavia l'esecuzione di interventi mini-invasivi attraverso incisioni di dimensioni ridotte. Soltanto l'impiego di una tecnologia di punta nel settore dei motori e di altri componenti rende possibile lo sviluppo di questo tipo di sistemi.
Il sistema chirurgico da Vinci S HD si basa sulla tecnologia di supporto sviluppata dallo SRI (ex Stanford Research Institute) per la chirurgia assistita da robot. Al fine di sviluppare ulteriormente il sistema da Vinci S HD, Intuitive Surgical ha in seguito operato in stretta collaborazione con IBM, Massachusetts Institute of Technology e Heartport Inc. Il sistema ha ottenuto dall'autorità medica americana competente (Food and Drug Administration, FDA) l'omologazione per gli interventi di chirurgia addominale, ad esempio sulla colecisti o sul colon, per la chirurgia toracica (ad eccezione delle operazioni al cuore) e per le operazioni alla prostata. In Europa, il sistema da Vinci S HD viene già utilizzato per l'esecuzione di operazioni di bypass cardiaco.
“Ogni giorno facciamo affidamento su più di 10.000 motori maxon per servire nel modo più sicuro pazienti, chirurghi e ospedali in tutto il mondo. E i motori maxon continuano a dare eccellenti risultati in fatto di elevata affidabilità, attrito ridotto e lunga durata di servizio. Ogni singolo sistema da Vinci deve superare dei severi test di rendimento, in cui vengono sottoposte a verifica caratteristiche quali attrito, gioco, mantenimento dei profili di conformità, feedback dei diversi sensori”, conclude Mike Prindiville, manager responsabile delle tecniche di produzione di Intuitive Surgical.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}